래피드(RAPID) ABB 로봇 프로그래밍 언어
프로그램 실행 방법
1. 디버그 - <PP를 메인으로 이동> 선택
2. 수동 모드라면 스위치를 눌러 모터 ON
3. 실행, 전진, 후진, 정지 버튼으로 운전
명령어 추가 항목 - 다양한 명령어를 선택해 사용 가능
편집 항목 - 복사, 잘라내기, 붙여넣기, 삭제, 범위 선택 등 다양한 수정 기능
MoveL 명령어
MoveL p10, V200, fine, tool_kwak;
MoveL p20, V200, fine, tool_kwak;
p10, p20 : 로봇 타겟 데이터
v200 : 속도, 200mm/s
fine : 로봇 이동 방법, 직선으로 이동 (zone 값의 경우 z50, z100 형식으로 표시되며, 원형으로 이동합니다)
tool_kwak : 현재 설정된 툴 (제가 지정한 이름입니다)
p10, p20의 경우 로봇 위치를 이동시킨 후 위치수정을 터치하면 그 위치기 p10, p20에 저장됩니다.
두 줄 입력 후 PP를 메인으로 이동 시킨 후 재생하면
p10에 저장한 위치에서 p20에 저장한 위치로 이동합니다.

명령어 MoveL 을 선택하면 자동으로 형식이 뜹니다.
각 항목을 선택해서 수정하면 됩니다.
MoveL을 이용해 사각형 그리기
PROC main()
AccSet 1, 1;
WHILE TRUE DO
MoveL pkwak, v150, fine, tool_kwak;
MoveL Offs(pkwak, 100,0,0) v150, fine, tool_kwak;
MoveL Offs(pkwak, 100,100,0) v150, fine, tool_kwak;
MoveL Offs(pkwak, 0,100,0) v150, fine, tool_kwak;
ENDWHILE
ENDPROC
pkwak에 최초 위치를 등록
offs 함수를 통해 pkwak 위치 기준으로 x 100, y 0 이동 - > x 100, y100 위치로 이동 - > x 0, y 100 위치로 이동
while문으로 반복(While 명령어 선택 후 TRUE 선택)
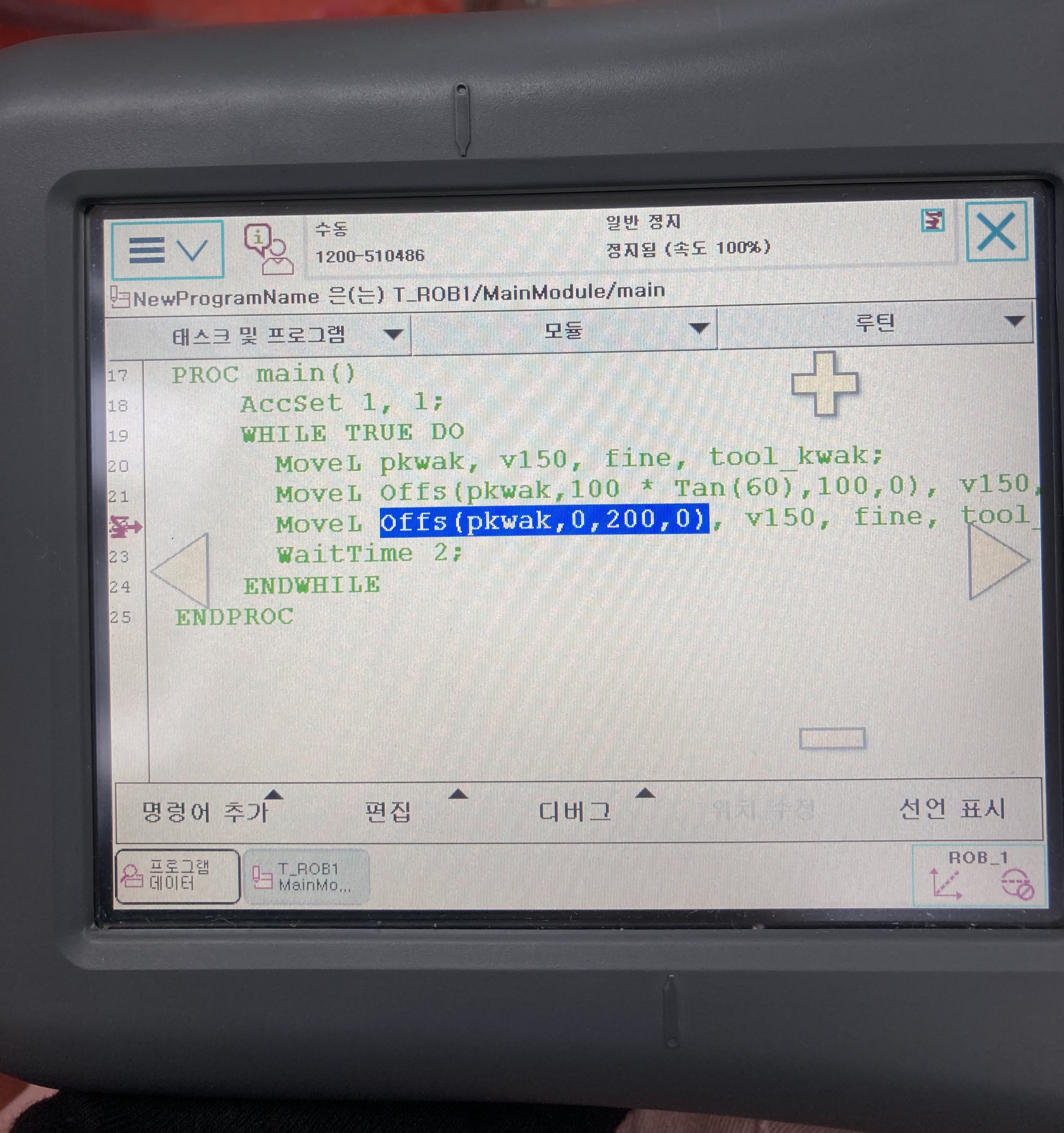
MoveL을 이용해 삼각형 그리기
PROC main()
AccSet 1, 1;
WHILE TRUE DO
MoveL pkwak, v150, fine, tool_kwak;
MoveL Offs(pkwak, 100*Tan(60),100,0) v150, fine, tool_kwak;
MoveL Offs(pkwak, 0,200,0) v150, fine, tool_kwak;
WaitTime 2;
ENDWHILE
ENDPROC
사각형 그리기와 마찬가지로 3개의 위치를 이동을 반복
WaitTime 은 대기 시간으로 2초를 넣어줘서 3번째 위치 이동 후 2초 대기 후 첫 위치로 복귀

'로봇제어' 카테고리의 다른 글
| 3. 플렉스팬던트 대화, IF 명령어 (0) | 2024.03.12 |
|---|---|
| 2. 로봇 제어 프로그램 - MoveJ, MoveC (0) | 2024.03.12 |
| 1. 로봇 제어 기초 - 설정 (1) | 2024.03.08 |


