 3. 플렉스팬던트 대화, IF 명령어
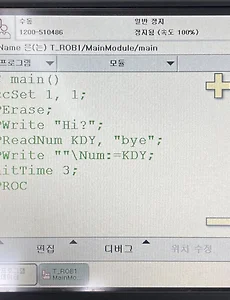
플렉스팬던트 활용 PROC main() TPErase; TPWrite "Hi?"; TPReadNum KDY, "bye"; TPWrite ""/Num:= KDY; ENDPROC TPErase - 출력 화면에 텍스트 삭제 TPWrite - 쓰기 TPReadNum - 출력 화면에 숫자 읽기 KDY는 num 형식으로 제가 지정해 준 변수 이름입니다 화면에 Hi?, bye, 숫자 입력 활성화 확인 가능 IF 문 PROC main() TPErase; TPWirte "10 or 20 or 30"; TPReadNum KDY, "input"; IF KDY = 10 THEN MoveL p10, v200, fine, tool_kwak; ENDIF IF KDY = 20 THEN MoveL p20, v200, fine, too..
2024. 3. 12.
3. 플렉스팬던트 대화, IF 명령어
플렉스팬던트 활용 PROC main() TPErase; TPWrite "Hi?"; TPReadNum KDY, "bye"; TPWrite ""/Num:= KDY; ENDPROC TPErase - 출력 화면에 텍스트 삭제 TPWrite - 쓰기 TPReadNum - 출력 화면에 숫자 읽기 KDY는 num 형식으로 제가 지정해 준 변수 이름입니다 화면에 Hi?, bye, 숫자 입력 활성화 확인 가능 IF 문 PROC main() TPErase; TPWirte "10 or 20 or 30"; TPReadNum KDY, "input"; IF KDY = 10 THEN MoveL p10, v200, fine, tool_kwak; ENDIF IF KDY = 20 THEN MoveL p20, v200, fine, too..
2024. 3. 12.
 2. 로봇 제어 프로그램 - MoveJ, MoveC
MoveJ 명령어 MoveJ p10, v200, fine, tool_kwak MoveJ p20, v200, fine, tool_kwak - 로봇 직선 이동이 아닌, 비선형 경로를 따라 목적지로 이동하는 명령어 (MoveL은 직선 이동) - 모든 축이 동시에 목적지 위치에 도달 MoveC 명령어 MoveL p10, v200, fine, tool_kwak MoveC Offs(p10, 70, 70, 0), Offs(p10, 140, 0, 0), v200, z10, tool_kwak MoveC Offs(p10, 70, -70, 0), p10, v200, z10, tool_kwak - 중심점을 주어진 대상까지 원형으로 이동 MoveJ 사용, 축이동 확인
2024. 3. 12.
2. 로봇 제어 프로그램 - MoveJ, MoveC
MoveJ 명령어 MoveJ p10, v200, fine, tool_kwak MoveJ p20, v200, fine, tool_kwak - 로봇 직선 이동이 아닌, 비선형 경로를 따라 목적지로 이동하는 명령어 (MoveL은 직선 이동) - 모든 축이 동시에 목적지 위치에 도달 MoveC 명령어 MoveL p10, v200, fine, tool_kwak MoveC Offs(p10, 70, 70, 0), Offs(p10, 140, 0, 0), v200, z10, tool_kwak MoveC Offs(p10, 70, -70, 0), p10, v200, z10, tool_kwak - 중심점을 주어진 대상까지 원형으로 이동 MoveJ 사용, 축이동 확인
2024. 3. 12.
 2. 로봇 제어 프로그램 - MoveL 명령어
래피드(RAPID) ABB 로봇 프로그래밍 언어 프로그램 실행 방법 1. 디버그 - 선택 2. 수동 모드라면 스위치를 눌러 모터 ON 3. 실행, 전진, 후진, 정지 버튼으로 운전 명령어 추가 항목 - 다양한 명령어를 선택해 사용 가능 편집 항목 - 복사, 잘라내기, 붙여넣기, 삭제, 범위 선택 등 다양한 수정 기능 MoveL 명령어 MoveL p10, V200, fine, tool_kwak; MoveL p20, V200, fine, tool_kwak; p10, p20 : 로봇 타겟 데이터 v200 : 속도, 200mm/s fine : 로봇 이동 방법, 직선으로 이동 (zone 값의 경우 z50, z100 형식으로 표시되며, 원형으로 이동합니다) tool_kwak : 현재 설정된 툴 (제가 지정한 이름입..
2024. 3. 11.
2. 로봇 제어 프로그램 - MoveL 명령어
래피드(RAPID) ABB 로봇 프로그래밍 언어 프로그램 실행 방법 1. 디버그 - 선택 2. 수동 모드라면 스위치를 눌러 모터 ON 3. 실행, 전진, 후진, 정지 버튼으로 운전 명령어 추가 항목 - 다양한 명령어를 선택해 사용 가능 편집 항목 - 복사, 잘라내기, 붙여넣기, 삭제, 범위 선택 등 다양한 수정 기능 MoveL 명령어 MoveL p10, V200, fine, tool_kwak; MoveL p20, V200, fine, tool_kwak; p10, p20 : 로봇 타겟 데이터 v200 : 속도, 200mm/s fine : 로봇 이동 방법, 직선으로 이동 (zone 값의 경우 z50, z100 형식으로 표시되며, 원형으로 이동합니다) tool_kwak : 현재 설정된 툴 (제가 지정한 이름입..
2024. 3. 11.



